

Drones have become to be viewed as a truly disruptive element within multiple areas over a very short period of time. It is still unclear what would be their true impact on freight, agriculture and transport, but they have already become irreplaceable in the fields of security and photography. Consumer electric-powered drones have become a reality as a result of maturity of a number of technologies including Li-ion batteries, GPS navigation, light-weight microelectronics, wireless communications and lately also machine vision and autonomous drive functions. This is of course coming in addition to the more mature technologies of gyroscopes, servo-motors and flight-control. The growth in drone sales is so far exponential, which implies their increasing penetration into existing drone markets of (photography, security and toys) and more importantly the resulting industrial evolution, which could allow drone introduction into additional fields. This study aims to draw the technology competitiveness trend of electric-powered drones, in order to project their future integration potential.
In recent years, we have witnessed the rising phenomenon of electric drones (EDs) also referred as multi-copters or civilian unmanned aerial vehicles, available at competitive prices on the market. As of 2015, the leading market for civilian drones is US (35% of total), with European Union closely following (30% of total) and China on the third place (15% of total). Estimated global sales of civilian drones have reached about 4.3 million units, worth some 1.7 billion USD, which makes it a pretty impressive market even already, with a high potential for further growth. Drones have become to be viewed as a truly disruptive element within multiple areas over a very short period of time. It is still unclear what would be their true impact on freight, agriculture and transport, but they have already become irreplaceable in the fields of security and photography.
The following analysis aims to compare the physical properties of electric drones (EDs) with small-scale internal combustion aerial vehicles (ICAVs). For the purpose of this study, the data of ten selected EDs has been utilized, based on the "Best Drones of 2016" publication by PCmag, updated for June 2016. With lack of model-specific information on sales, the drones were equally weighted to obtain averages for ED weight, battery's watt-hour capacity and rated flight time. The surveyed EDs included models under brand names of DJI, Xiro, 3DRobotics, Blade, Parrot ad Yuneec. The comparison of ED was made versus an ICAV - the gasoline-powered toy helicopter Century Radikal G20 with 300ml fuel tank. The weighted average with standard deviation of EDs is depicted on the following charts in comparison to parallel figures of ICAV. The energy content of gasoline was rated in watt-hours for proper comparison to electric batteries.
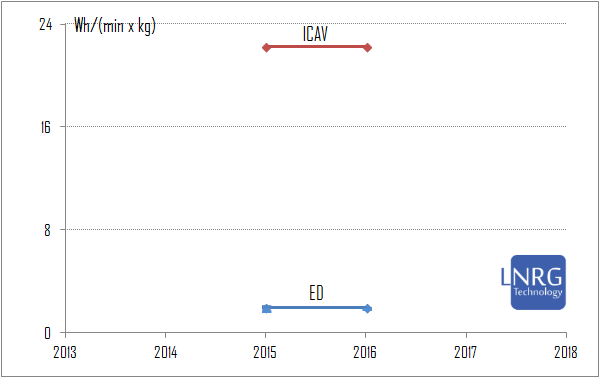
Figure 1. Weight-normalized energy capacity (watt-hours) per aerial vehicle flight time (min) of electric drones in comparison to ICAV, represented by Century Radikal G20 model. Weight-normalized energy-per-flight-time can serve as a tool to measure aerial vehicle's efficiency, with lower values indicating higher energy efficiency and thus EDs being far superior to ICAVs.
Weight-normalized energy-per-flight-time is basically equivalent to the "mpg" (miles-per-gallon) rating of vehicles, describing weight-normalized energy efficiency. We can see that from 2015 to 2016 there had been little change in weight-normalized energy-per-flight-time of EDs. Notably, the best 2016 figures of energy-per-flight-time for EDs were obtained by Xiro Xplorer G with an impressive 0.61 Wh/(min*kg), whereas the least performance was obtained by 3DRobotics Solo with 2.64 Wh/(min*kg). In comparison, the ICAV showed a much worse performance of above 20 Wh/(min*kg) - indicating a ten-fold advantage of electric-powered drones over their fuel-powered cousins. It should be mentioned that some ED manufacturers specify the full capacity of their Li-ion battery, whereas others specify only the usable capacity; for the matter of this study the full capacity was calculated.

Figure 2. Rated aerial vehicle flight time (min) to aerial vehicle net weight (kg) of EDs in comparison to an ICAV, represented by Century Radikal G20 model. The flight-time-per-weight can serve as a measure for normalized comparison of flight range.
The flight-time-per-weight is a fair parameter to analyze EDs performance and compare them to ICAVs in terms of range, while neutralizing the size factor. The most impressive ED flight-time-per-weight in 2016 was held by Parrot Bebop with 54.27 min/kg, whereas the least flight-time-per-weight was obtained by DJI Inspire 1 with just 6.13 min/kg. ED weighted flight-time-per-weight remained stable during 2015-16. The gap between ED and ICAV models in terms of flight-time-per-weight is actually in favor of electric-powered units due to their superior efficiency. This also explains the sudden emergence of efficient and cheap electric drones, whereas gasoline-powered unmanned vehicles have historically been inefficient and expensive.
This "flight parity" analysis of electric-powered drones (EDs) indicates a much more efficient propulsion system of EDs in comparison to ICAVs and ED superiority in terms of normalized flight time. This comes despite a much higher energy capacity of ICAV units, which gets wasted due to low efficiency. In summary, as of 2016, mainstream EDs seem to be greatly superior over niche ICAVs.
The extended commercial report can be purchased at LNRG Technology digital store (below).














